1. Tujuan
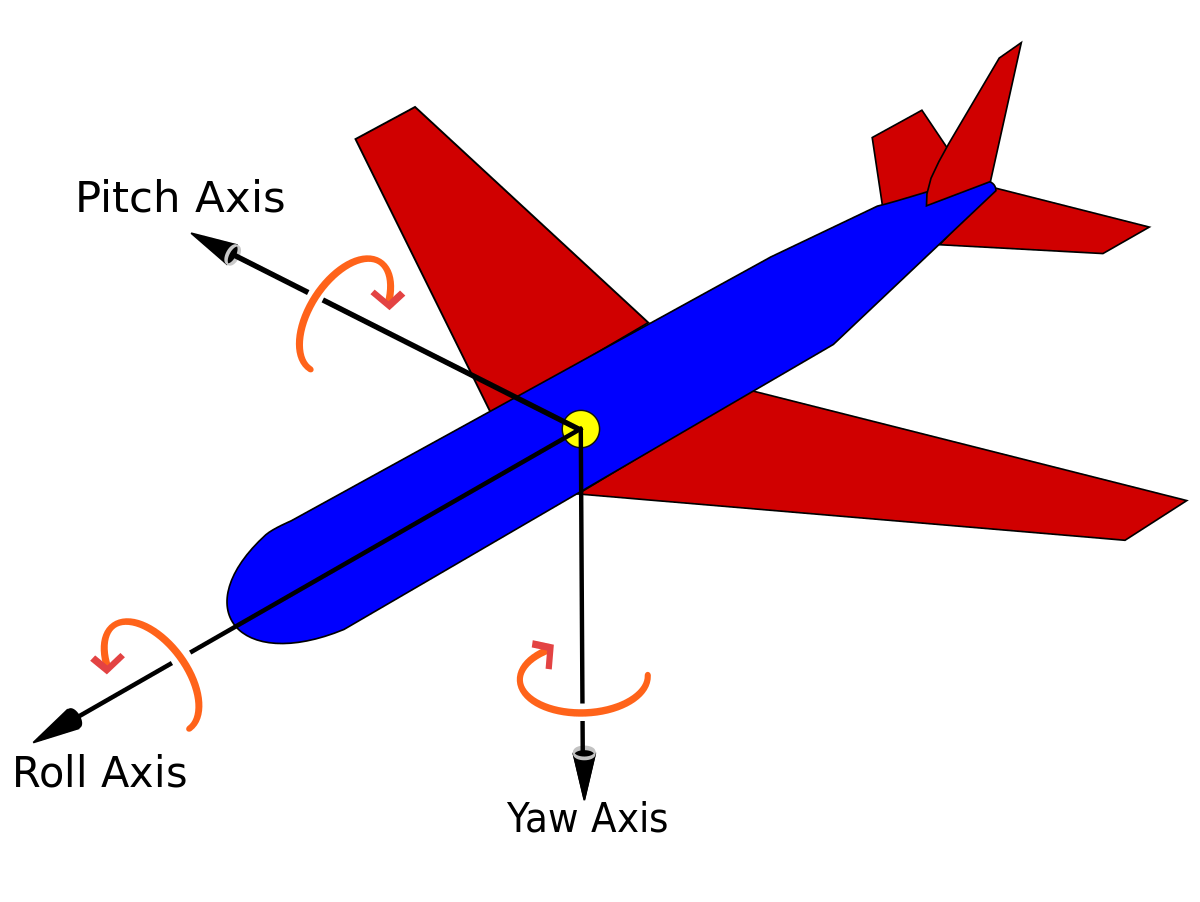
- Kendali untuk mengatur perputaran motor dan arah geraknya

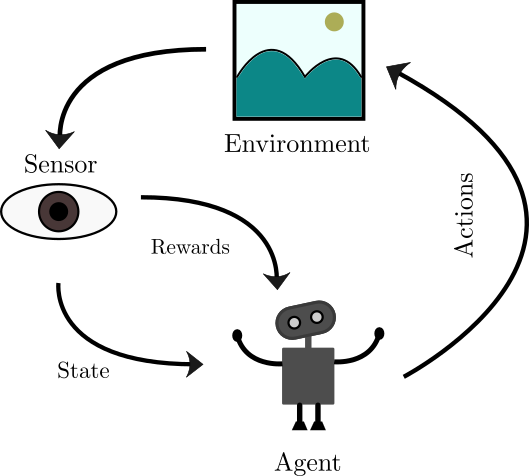
- Reinforcement Learning
- Markov Decision Process
- Q-Learning
Markov Decision Process lebih dikenal dengan MDP adalah suatu pendekatan dalam RL untuk mengambil keputusan dalam environment gridworld. Lingkungan gridworld terdiri dari state dalam bentuk grid.
MDP mencoba menangkap dunia dalam bentuk grid dengan membaginya menjadi state, action, model / model transition, dan reward. Solusi untuk MDP disebut policy dan tujuannya adalah menemukan policy yang optimal untuk tugas MDP tersebut. Oleh karenanya parameter berikut digunakan untuk mendapatkan solusi yang diharapkan:
- Set of states -S
- Set of actions- A(s), A
- Transition- T(s,a,s’) ~ P(s’|s,a)
- Reward- R(s), R(s,a), R(s,a,s’)
- Policy- n
- Value- V

Algoritma RL, melakukan pengamatan (observation) dan evaluasi (evaluation) setiap pencapaian. Reinforcement learning dapat belajar dari pengalaman.
Agent di dalam environtment diharuskan mengambil tindakan yang didasarkan pada state saat ini. Jenis pembelajaran ini berbeda dengan supervised learning dalam artian data training pada model sebelumnya memiliki output mapping yang disediakan sedemikian rupa sehingga model mampu mempelajari jawaban yang benar. Sedangkan dalam hal ini RL tidak ada kunci jawaban yang disediakan kepada agent ketika harus melakukan action tertentu. Jika tidak ada set data pelatihan, ia belajar dari pengalamannya sendiri.
Q Learning
Q-learning (disebut sebagai model free algorithm) adalah algoritma RL tanpa model untuk mempelajari policy yang memberi tahu agen tindakan apa yang harus diambil dalam keadaan apa. Q-learning tidak memerlukan model dari environtment, dan dapat menangani masalah dengan transisi stokastik dan reward, tanpa memerlukan adaptasi.
- Layer Pelatihan





- Run program: ubah trajectories/arah di file
control/runsim.mand running program

- untuk kendali dan parameter P, I dan D lihat
control/animation.muntuk implementasi dari PID controller.



- Program diatas dapat disederhanakan menjadi

No comments:
Post a Comment